The 20th century marked a significant period of evolution in the field of robotics, ushering in a transformative era of technological advancement.
Starting with the term itself, coined by Czech playwright Karel Čapek in his play “R.U.R.” (Rossum’s Universal Robots) in 1920, the century witnessed the conceptualization and subsequent development of a wide range of robotic technologies.
In 1927, the film “Metropolis” showcased the iconic robot Maria, an emblematic representation of the era’s imaginative exploration of human-like machines.
During this period, a British inventor named Charles Lawson introduced “Superman Dennis,” a robot capable of various tasks, standing as a testament to the era’s pioneering spirit.
 However, it was not until the latter half of the century that technological advancements allowed robotics to make significant strides.
However, it was not until the latter half of the century that technological advancements allowed robotics to make significant strides.
The 1950s brought forth the development of the first industrial robots, designed to carry out repetitive tasks in controlled environments.
These early industrial robots laid the groundwork for automation in manufacturing, marking a pivotal step toward modern robotics.
As computing technology advanced, so did the capabilities of robots. In the 1960s and 1970s, researchers like Shakey the Robot, developed at Stanford Research Institute, began to explore the realm of artificial intelligence and autonomous navigation.
The era also witnessed the emergence of robots like the Unimate, the first industrial robot used in production lines.
Yasutaro Mitsui’s Robot (1932)

Yasutaro Mitsui with his steel humanoid robot, Tokyo, Japan, 1932.
The Yasutaro Mitsui Steel Humanoid robot is a significant early example of a Japanese robot in human-like form.
The robot’s picture appears in a book from 1993 by Haruki Inoue called “Nihon Robotto Soseiki 1920-1938.”
The robot’s visible electrical parts and valves seem to be more for looks, showing influence from earlier Wensley’s Televox images.
This kind of design, where the inner workings are exposed, became a common feature in Japanese robots and toy designs.
When we closely examine Mitsui’s robot, it doesn’t seem to move much. There are no wheels on its feet, and its leg shape suggests it can’t walk.
There are marks on the upper legs that hint at a possible bowing action, which makes sense considering the Japanese culture.
The fingers and neck don’t bend, and the arms can only move up at the shoulder and rotate at the elbow. We can also see a power cord going up its left leg.
El Chispas Robot, Spain (1953)

El Chispas Robot, Spain, in 1953.
According to Antonio Gual of Barcelona: During the 1950s, my father, Antoni Gual Segura, and his colleagues at the local radio station, Radio Vilafranca, undertook a collaborative effort to design and construct a remarkable creation known as “El Chispas” (translated as “Sparks”).
This ingenious creation boasted the ability to move its arms, engage in speech, and featured a window located at its midsection, revealing captivating sparks.
The introduction of “El Chispas” during the festive Fiesta Mayor of that particular year sparked quite a sensation, leaving a lasting impression on the attendees.
Superman Dennis the Robot (1939)
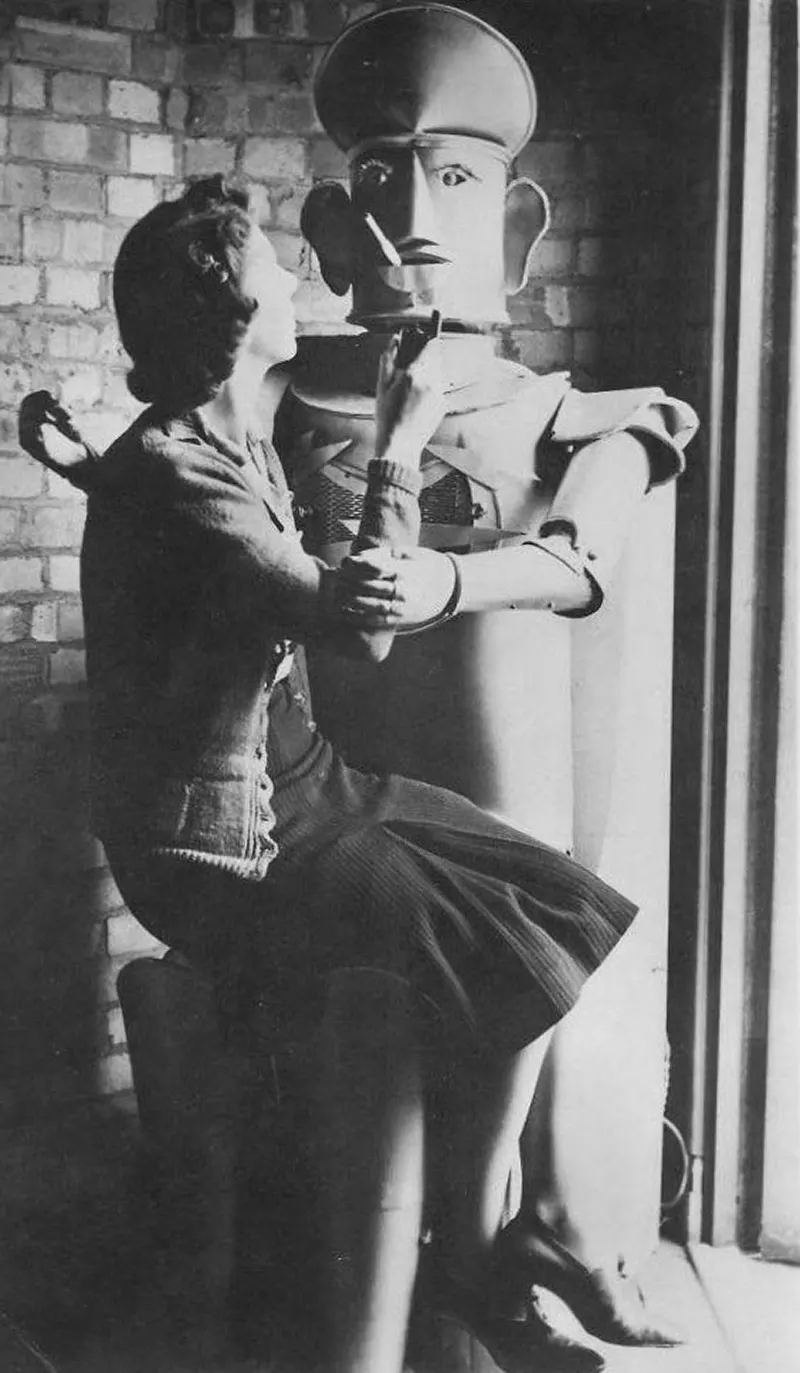
Superman Dennis the Robot. The earliest known date of 1939 is from the above Popular Science advert in Webster’s Dictionary.
In 1939, British inventor Charles Lawson created “Superman Dennis,” a 7-foot-tall robot.
This robot claimed to do various things like controlling traffic, singing, lighting and smoking a cigarette, and sitting or standing.
Despite limited details, it highlighted the creative spirit of its time, showing how machines could imitate human actions and contribute to different tasks.
Mobot (1961)

“Mobot” (MObile roBOT) made by Hughes Aircraft Electronic Labs dressing a woman in California, 1961. (Photo by Life Magazine).
The year is 1961 and Hughes Aircraft Electronic Labs was set to revolutionize the world with Mobot the Magnificent Mobile Robot.
Mobot was slightly larger than several refrigerators put together and the mechanical marvel was supposed to automate every mission critical task in your life like doing your nails, zipping up your dress, and helping you comb your hair while looking at yourself in a mirror.
The term ‘Mobot’ is a combination of “mobile” and “robot,” signifying its function as a mobile robotic system. This project was aimed at exploring and advancing the capabilities of autonomous mobile robots.

The ‘Mobot’ project was initiated to develop a robot that could navigate and perform tasks autonomously.
It was designed to demonstrate the potential of robotics in various applications, such as surveillance, exploration, and possibly even tasks in hazardous environments.
The project likely involved incorporating sensors, computing systems, and algorithms to enable the robot to sense its environment, make decisions, and navigate without direct human control.
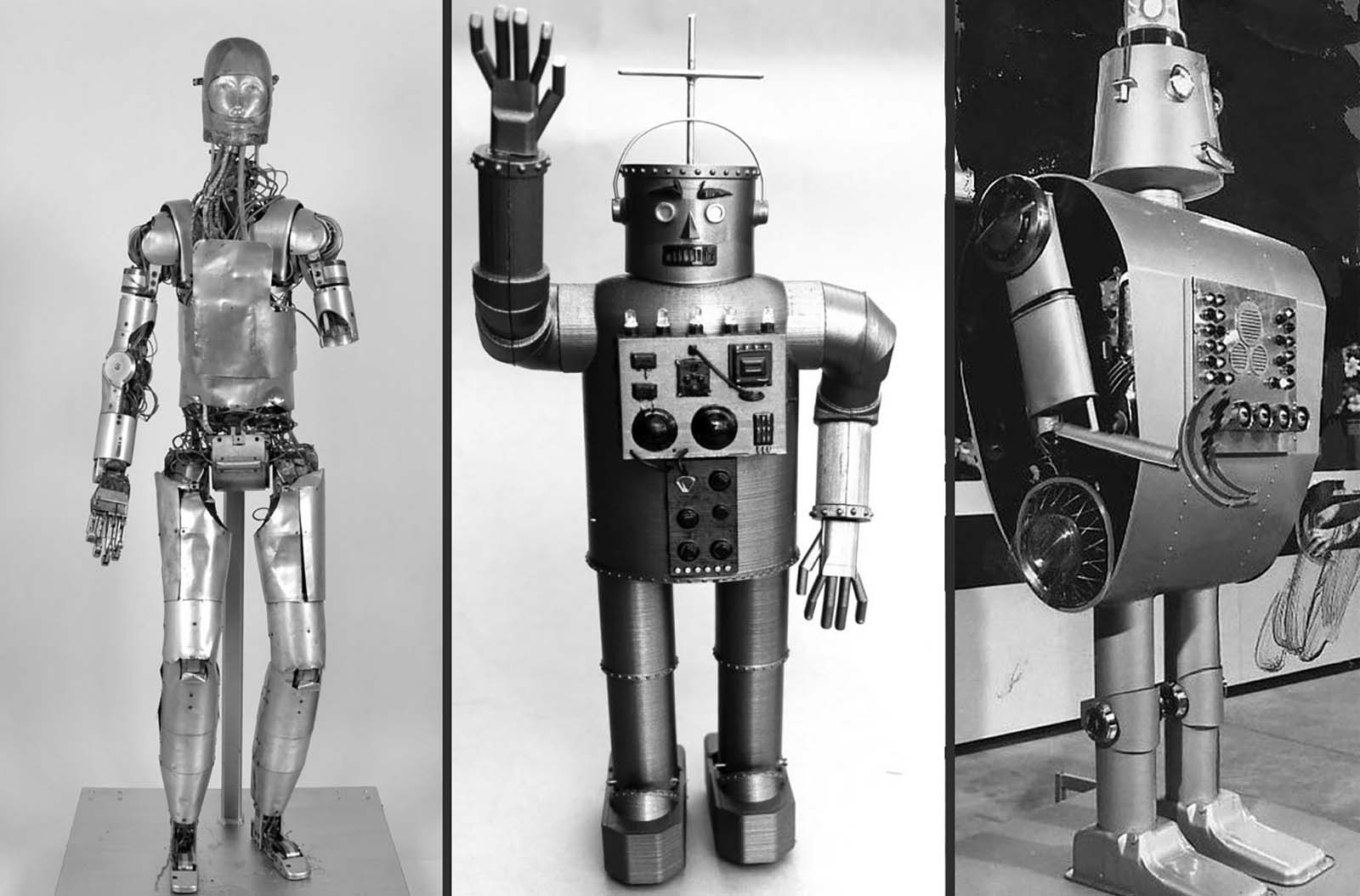
NASA’s 1965 Space Suit Test Robot Machine

Before NASA launched men to walk on the moon, the space agency almost turned to a human-like robot to test its astronauts’ prototype spacesuits.
The hydraulic-powered android might have worked, too — had it not been for its tendency to leak oil when used. The so-called “Power Driven Articulated Dummy” project ran from May 22, 1963 through July 31, 1965.
Produced by the IIT Research Institute in Chicago, the robot could be used to simulate 35 basic human motions.
It was equipped with sensors at each joint to measure the forces imposed on the human body by a pressurized spacesuit.
The robot dummy’s movements were enabled by hydraulic actuators powered by oil that flowed through a nylon-tube circulatory system.

An extraordinary hydraulically powered robot dummy designed for NASA to use in testing spacesuits, circa 1963-1965.
The design allowed for the android to swivel its hips, raise and lower its arms and legs, shrug its shoulders, clench its fists, and even shake hands — but it could not handle the pressure needed to move the robot’s extremities without leaking.
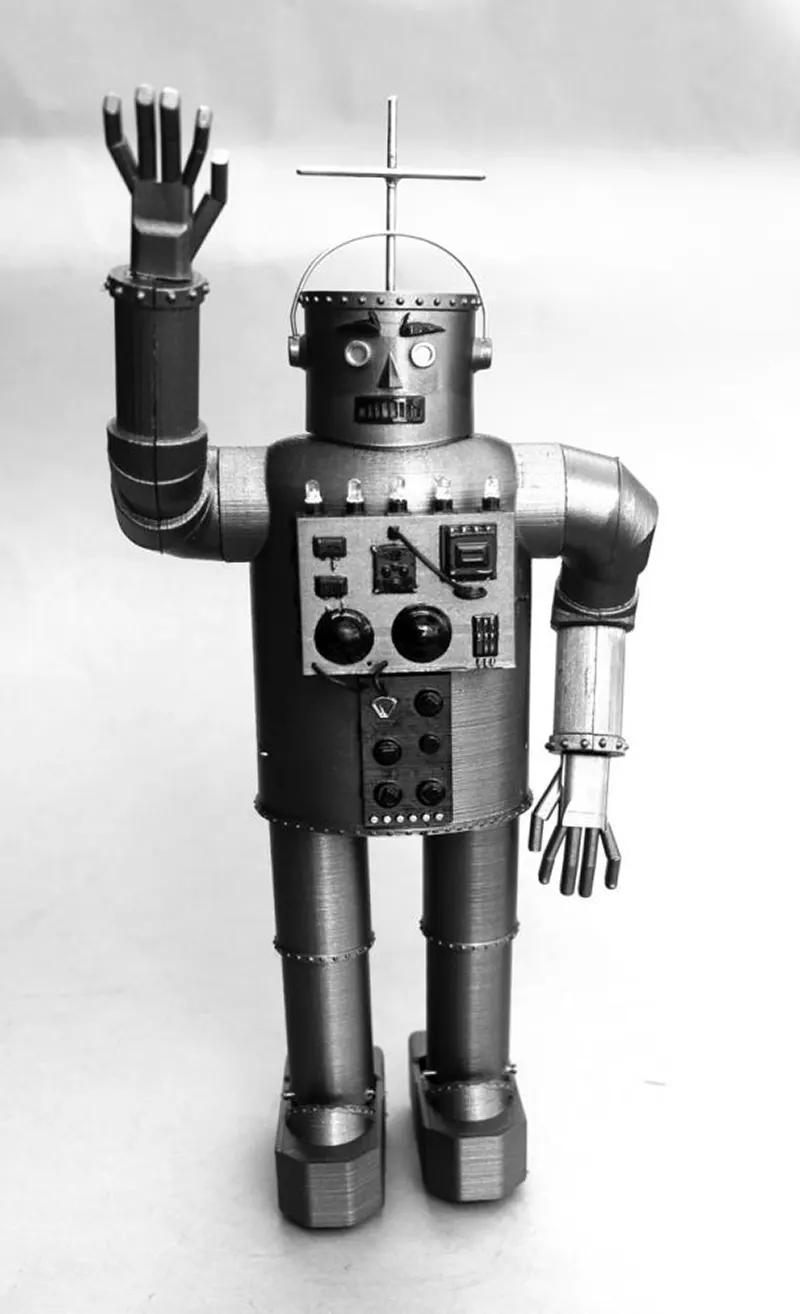
Sepulka of Soviet Union (1962)

Sepulka, the Guide Robot, Soviet Union, 1962.
“This robotic guide was developed in 1962 in an experimental workshop of the All-Union Society “Znanie” by designer M. Aleksandrov and art director M. Gorokhov and then refurbished in 1987.
The speech is reproduced with a built-in tape recorder. Robot’s movements tape playback are remotely radio-controlled from distances up to 20 m.
Sepulka was named after a robotic character from Stanislaw Lem’s stories. Stanislaw Lem’s character Sepulka was an object of an unknown origin and purpose.”
Freddie Ford (1960s)

“Freddie Ford,” a mechanical robot that answers questions.
Made almost entirely out of car parts, Freddie stood nine feet high and weighed more than 360 kg, while his chest was 126 inches, and waist 120 inches.
He had oil pans for feet and brake shoes for hands. His ears were made of radiator caps with car antennas attached.
His eyes were parking lights from a Ford Mustang, while his mouth was a reversing light from a Ford Thunderbird. His arms were exhaust pipes and his legs were shock absorbers.
Freddie was used to help Ford sell cars at car shows from 1967. He was not very active, but he could answer a dozen questions in front of an audience.
Unsurprisingly, most of his answers contained corny jokes and spoke glowingly of Ford products.
Cosmos the Robot, France (1958)

Cosmos the Robot from 1958.
“Move Over, Human”. Even the most seasoned Parisian driver might find it hard to resist the directives of this peculiar vehicle’s driver.
But there’s no extraterrestrial influence here; it’s a robot born and bred right here on Earth. Meet “Cosmos,” a homegrown creation that stood alongside a helicopter at a science exhibition on the Seine’s shores.
Despite the French reputation for nonchalance, “Cosmos” managed to captivate a considerable amount of attention.
Robo Sensor (1982)

Robo Sensor of Japan from 1982.
Weekly Reader issue 23, April 2, 1982 “Japanese robot shakes a person’s hand while special sensors in the robot measure grip and body temperature.
Figures are displayed and the robot might make comments like: WOW what a grip! The robot can also measure room temperature and gas leaks.”
Goro Robot (1964)

Goro, the Robot from Japan.
Goro, a five-foot robot developed by a toy research firm, is surrounded by school children in the Japanese capital Tokyo on Feb 29, 1964.
Goro walks in all directions, bows to people he meets winks at the girls, and talks via a radio in the hand of his maker.
Gygan (1957)

Gygan, weighing 1200 pounds, could easily carry two girls around.
Gygan, a giant radio-controlled robot, which more than half a century ago entranced the world by flashing its car headlamp-like eyes, turning its head stiffly from left to right, and shuffling forwards at the terrifying speed of 10 feet a minute, is to be auctioned after decades hidden in a private collection.
The eight-foot-tall creature, weighing 1,000lbs, was launched at a trade fair in Milan in 1957, the same year as the first satellite, Sputnik, was launched into space.

Cygan Robot from Italy.
Its designer, Piero Fiorito, an engineer from Turin, puzzlingly insisted it looked like “a proud Englishman”.
Barbarossa Robot (1909)

Occultus (or Barbarossa) Robot was exhibited in Berlin in 1909 by Mr. Adolph Whitman, a famous German inventor.
Very little is known other than a weird photo and article on a robot named Occultus or Barbarossa, exhibited in Berlin in 1909 by Herr Adolph Whitman, a famous German inventor.
After many years, Whitman has succeeded in making a mechanical man that can walk, and make other human movements such as speak, sing, whistle, and laugh.
This mechanical masterpiece is so human that at a distance of a yard, it cannot be told from a living being. The figure is a mass of intricate cogs and machinery.
In the chest, a number of phonographs are arranged, but how the machinery is controlled is a secret of the inventor.
It has been said that wireless electric waves are at the bottom of the mechanical miracle. Each part of the figure is controlled by a little electric motor.
Unimate Robot (1961)

Coffee served by Unimate robot, 1967.
Unimate was the first industrial robot, which worked on a General Motors assembly line at the Inland Fisher Guide Plant in Ewing Township, New Jersey, in 1961.
It was invented by George Devol in the 1950s using his original patent filed in 1954 and granted in 1961. The patent begins:
The present invention relates to the automatic operation of machinery, particularly the handling apparatus, and to automatic control apparatus suited for such machinery.
The machine undertook the job of transporting die castings from an assembly line and welding these parts on auto bodies, a dangerous task for workers, who might be poisoned by toxic fumes or lose a limb if they were not careful.
Eric, British robot (1928)

Eric Robot with its inventor, Captain W.H. Richards.
Even British robots have afternoon tea. Eric, the first British robot ever to exist, seemed to believe he had an example to set.
The invention of the Englishman Captain W.H. Richards, Eric was able to turn his head and take a bow.
Arok Robot (1970s)
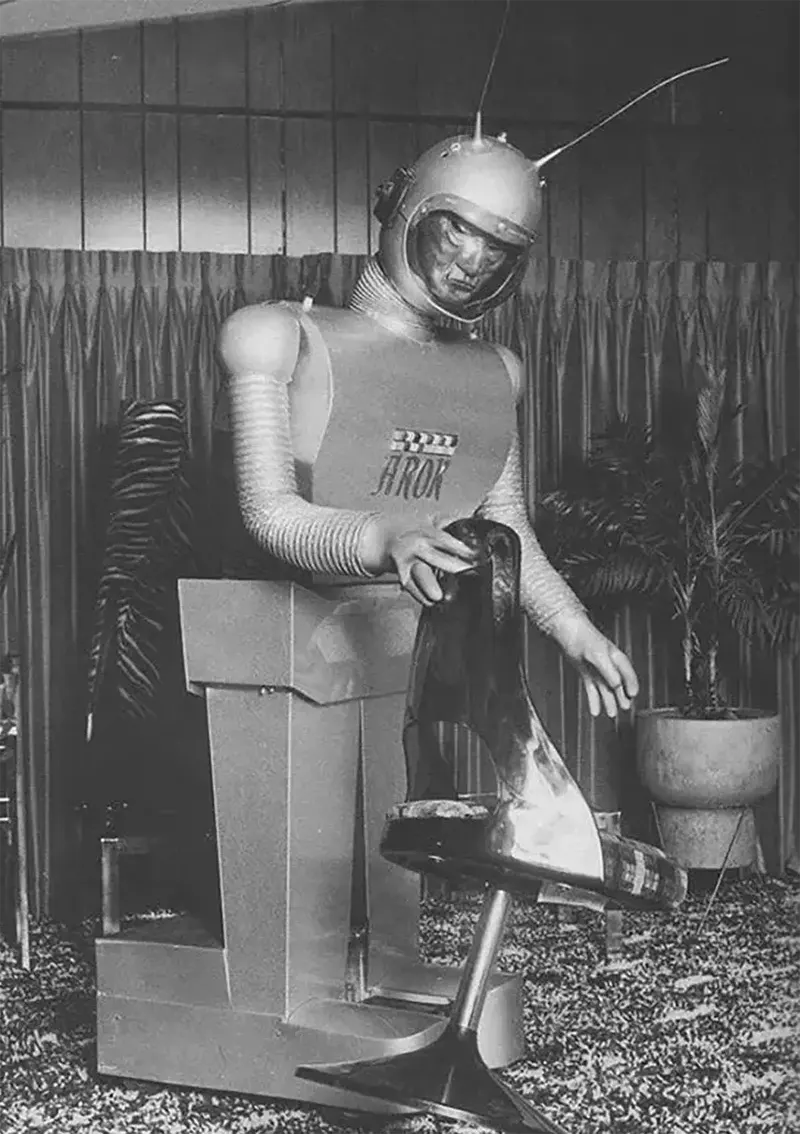
Arok the Robot by Ben Skora, 1970s.
The creation by Ben Skora, of Palos Hills, who is now in an assisted-living facility. AROK (Skora’s name spelled backward without the S), when operational, could perform a variety of tasks such as vacuuming, mixing drinks, talking, taking photos, lifting up to 150 pounds, and walking the dog.
It also could bend at the waist to a 45-degree angle and turn the upper torso to the right and left. He could “motor” along at a brisk 3 mph.
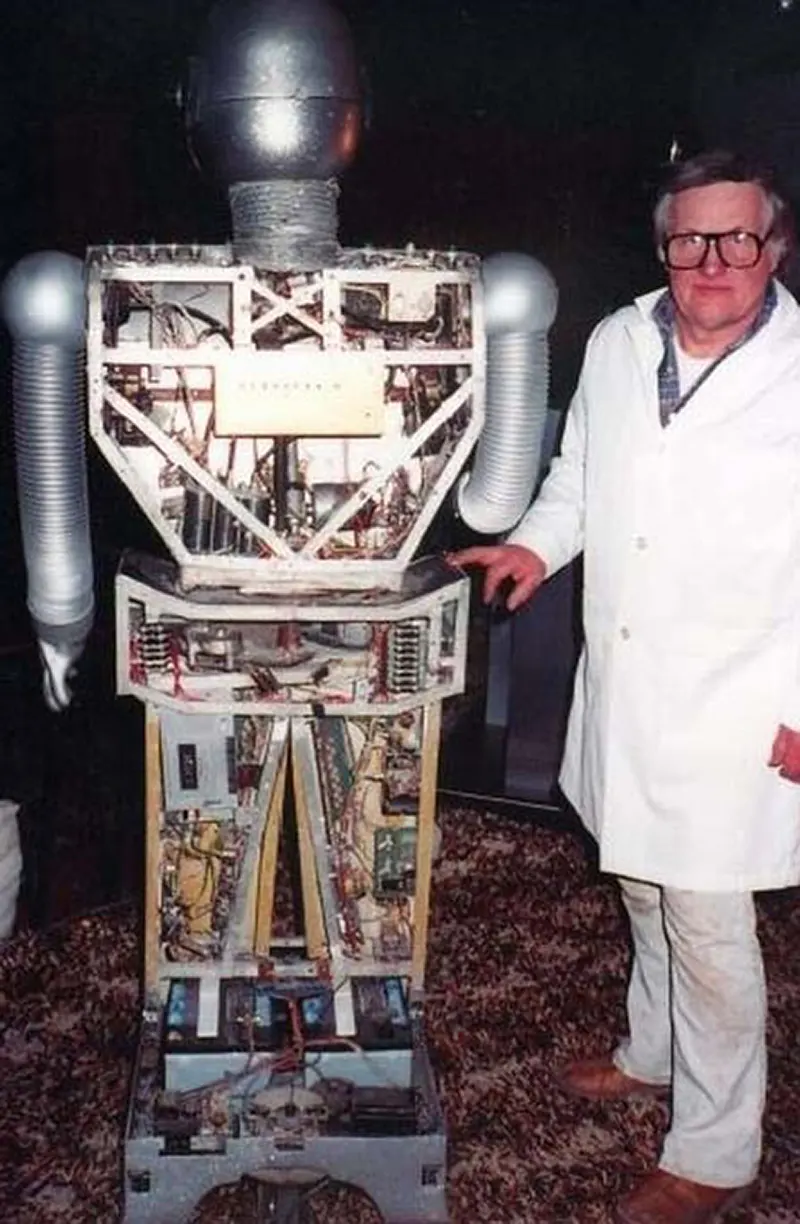 Skora spent from 1969 to 1975 creating AROK using common, everyday parts. Inside the aluminum exterior, the robot has two 12-volt automobile batteries, 15 electronic motors, 35 relays, and hundreds of solid-state integrated circuits.
Skora spent from 1969 to 1975 creating AROK using common, everyday parts. Inside the aluminum exterior, the robot has two 12-volt automobile batteries, 15 electronic motors, 35 relays, and hundreds of solid-state integrated circuits.
He has a motorcycle helmet for a skull, a clothes-dryer exhaust hose for arms and rubber gloves for hands. There is a microphone in his control panel and a speaker in his head.

It can be controlled by a TV remote using FM radio signals. One of the two 12-volt car batteries supplies power to operate AROK and the other to drive the motors.
The batteries are placed on platforms in the feet and the drive mechanism is in the base.
Leonardo’s Robot (1492)

Model of Leonardo’s robot with inner workings. Possibly constructed by Leonardo da Vinci around the year 1495.
The design notes for the robot appear in sketchbooks that were rediscovered in the 1950s. Leonardo is said to have displayed the machine at a celebration hosted by Ludovico Sforza at the court of Milan in 1495.
The robot knight could stand, sit, raise its visor, and independently maneuver its arms, and had an anatomically correct jaw.
The entire robotic system was operated by a series of pulleys and cables. Since the discovery of the sketchbook, the robot has been built faithfully based on Leonardo’s design and was found to be fully functional.
The robot Maria from Metropolis (1927)

Maria from the movie Metropolis.
“Metropolis,” a silent science fiction film released in 1927 and directed by Fritz Lang, introduced audiences to the iconic robot character named Maria.
Designed to resemble a human woman, Maria’s appearance in “Metropolis” was truly ahead of its time. Her creation was a technological marvel, combining imaginative design with early special effects techniques.
Maria’s role in the film was to serve as an instrument of manipulation and control. She was used to manipulate the workers in the city’s underground and maintain the status quo.
(Photo credit: Wikimedia Commons / Flickr).